
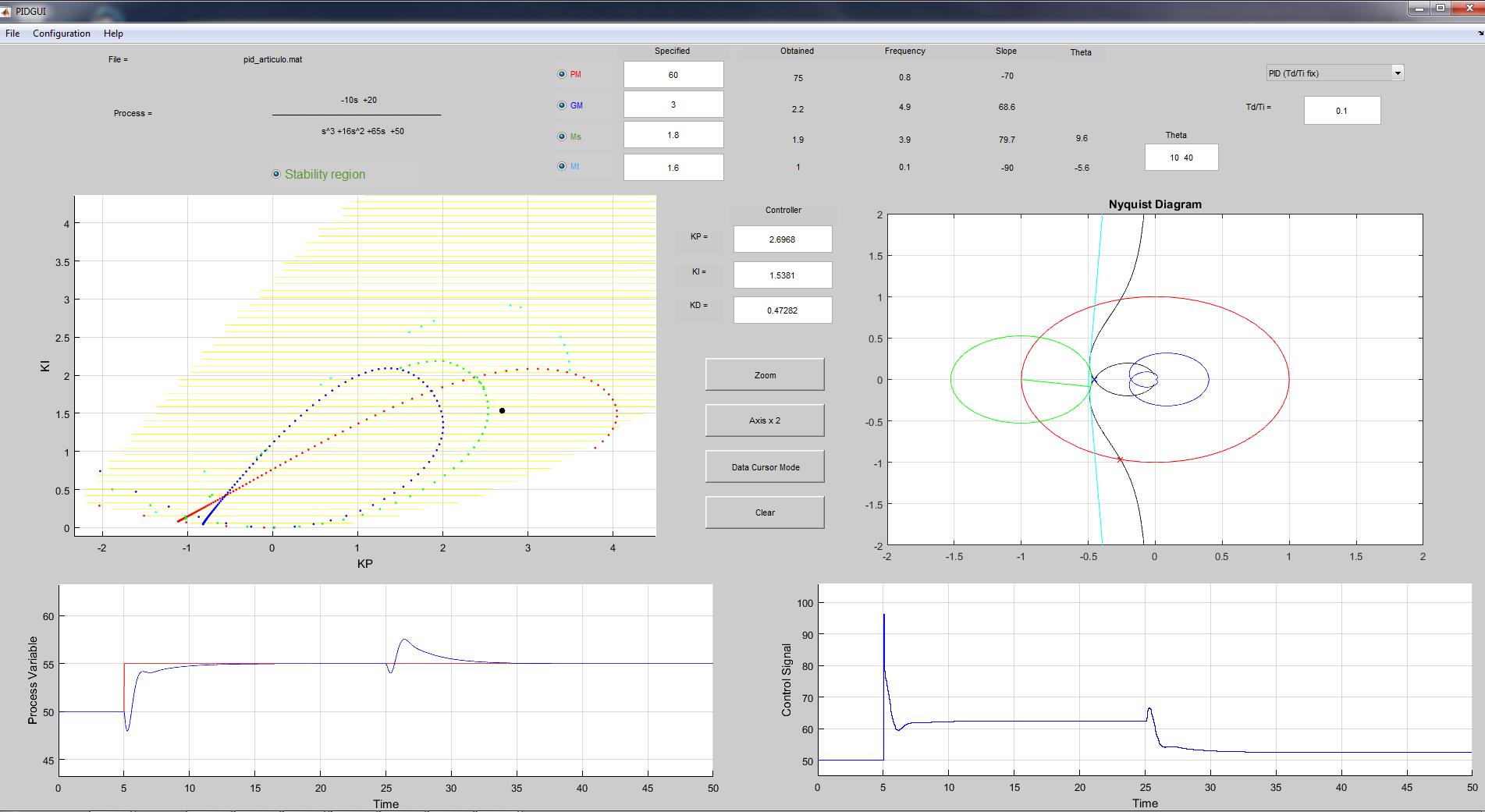
PIDGUI (NUEVA VERSIÓN, julio 2018). Entorno en inglés que le permitirá realizar simulaciones con el controlador PID, probar parámetros de control y poner en práctica los ajustes por especificaciones en el dominio de la frecuencia con garantías de estabilidad. El desarrollo original es de F. Morilla, F. Vázquez, y R. Hernández, mientras que las adaptaciones y mejoras para la nueva versión han sido realizadas por J. Garrido y M. L. Ruz.
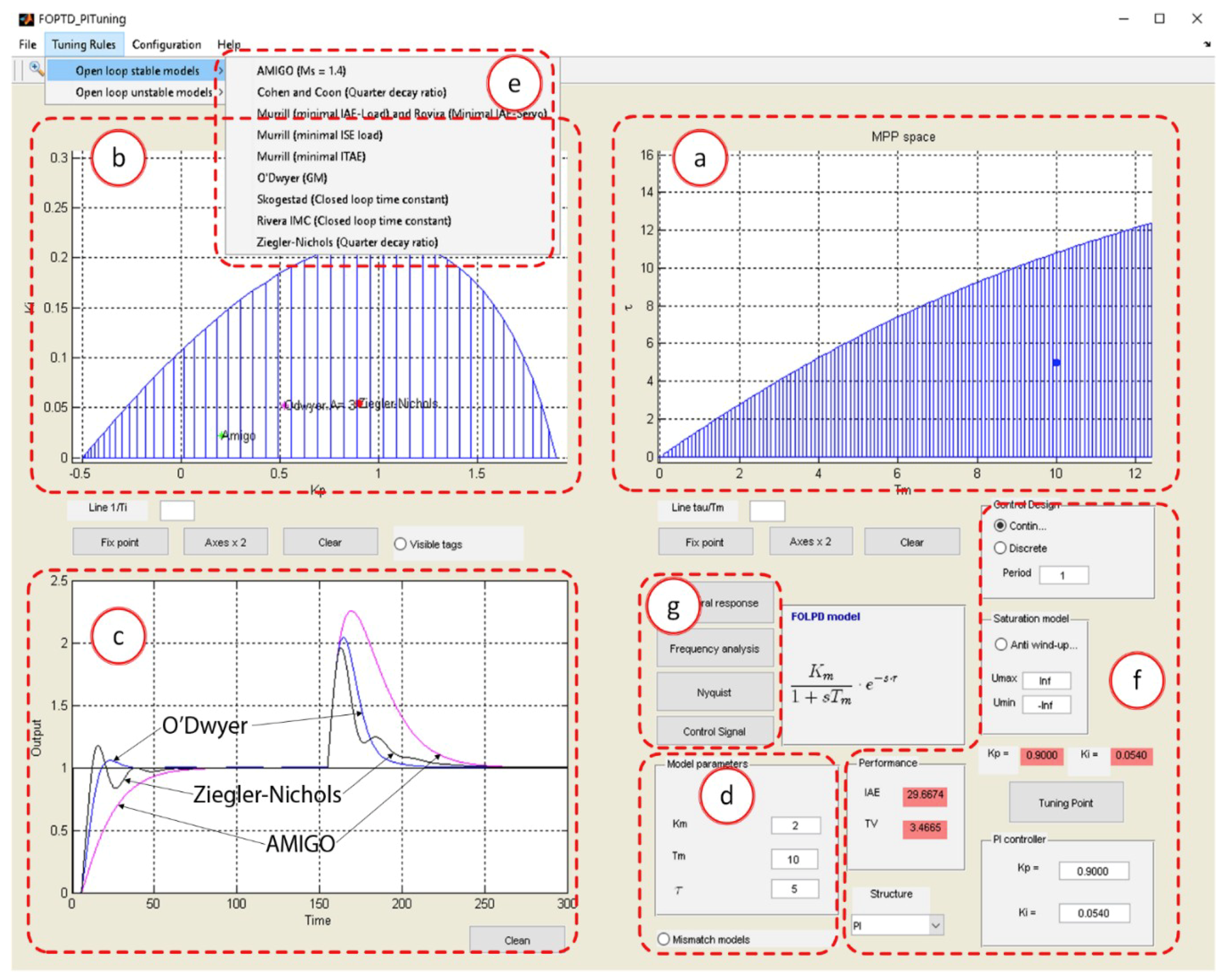
FOPTD_PI_TOOL (NUEVA VERSIÓN, julio 2018). Entorno en inglés que le permitirá ilustrar conceptos básicos de control a partir de un conjunto de reglas de sintonía de controladores PI, utilizando modelos de primer orden con retardo tanto estables como inestables. El desarrollo original es de M. L. Ruz, F. Morilla y F. Vázquez, mientras que las adaptaciones y mejoras para la nueva versión han sido realizadas por M. L. Ruz y J. Garrido.
TITO. Entorno en inglés para simulación, análisis y sintonía de sistemas 2x2 (2 entradas - 2 salidas) con control PID descentralizado o centralizado (desacoplo+PID). El desarrollo original es de F. Vázquez y de F. Morilla, pero en los últimos cambios (cálculo de desacoplos con retardo y de desacoplos estáticos) ha colaborado también J. Garrido.
Funciones para ajuste empírico de controladores PID. Conjunto de funciones programadas por F. Morilla, que le permitirán poner en práctica los procedimientos descritos en el tema 3 del curso de doctorado "Controladores PID".